In collaboration with the CCNY ASME Club, the CCNY Robotics Club participated in the 2018 ASME Student Design Competition during the 2017-2018 academic year.
I led a team of seven students in the design, prototyping, and manufacturing of three different soccer-playing robots.
I led a team of seven students in the design, prototyping, and manufacturing of three different soccer-playing robots.
Design

|
|
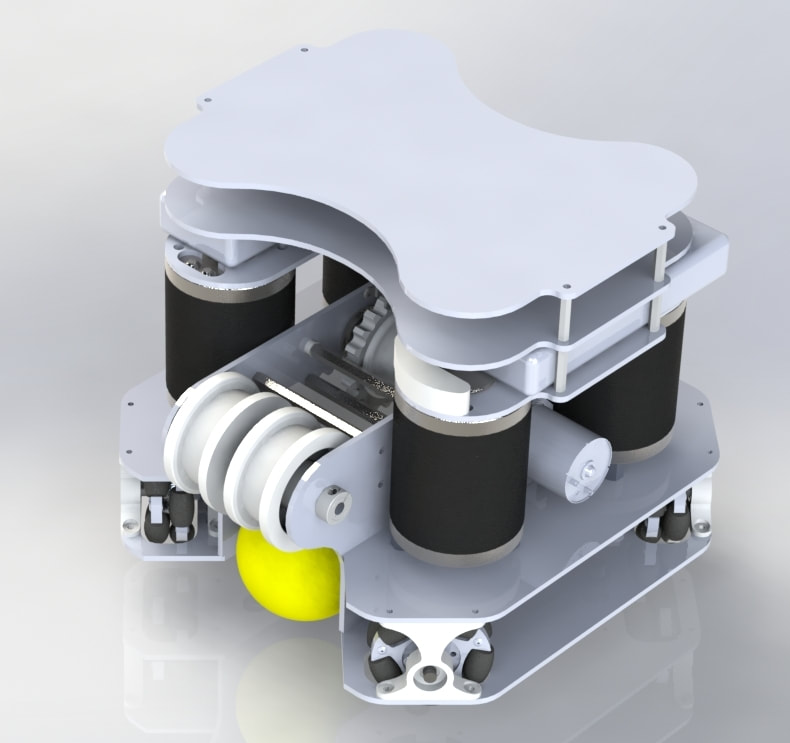
The first robot, shown above, was designed and built primarily by me. The sheets were laser cut out of Delrin, which I have found to be a great material for prototyping.
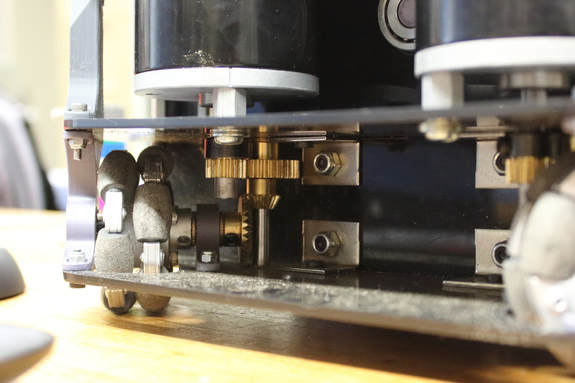
To gain more experience with gearbox design, I had decided to design my own gearing for the drive train. With four gears per motor and four motors, there are 16 different gears in total and each gear is fixed to the shaft by set screws. Although I have always been leery of set screws—they are highly unreliable--they were the only choice that fit the budget when buying gears.
One enormous flaw in this design is that the gear shaft is able to slide back and forth by a fraction of a millimeter. This is mainly due to the flexibility of Delrin, which I regret overlooking. At high RPMs, this led to excessive vibration, which accelerated the loosening of the set screws (even with high strength Loctite).
To gain more experience with gearbox design, I had decided to design my own gearing for the drive train. With four gears per motor and four motors, there are 16 different gears in total and each gear is fixed to the shaft by set screws. Although I have always been leery of set screws—they are highly unreliable--they were the only choice that fit the budget when buying gears.
One enormous flaw in this design is that the gear shaft is able to slide back and forth by a fraction of a millimeter. This is mainly due to the flexibility of Delrin, which I regret overlooking. At high RPMs, this led to excessive vibration, which accelerated the loosening of the set screws (even with high strength Loctite).
Leadership
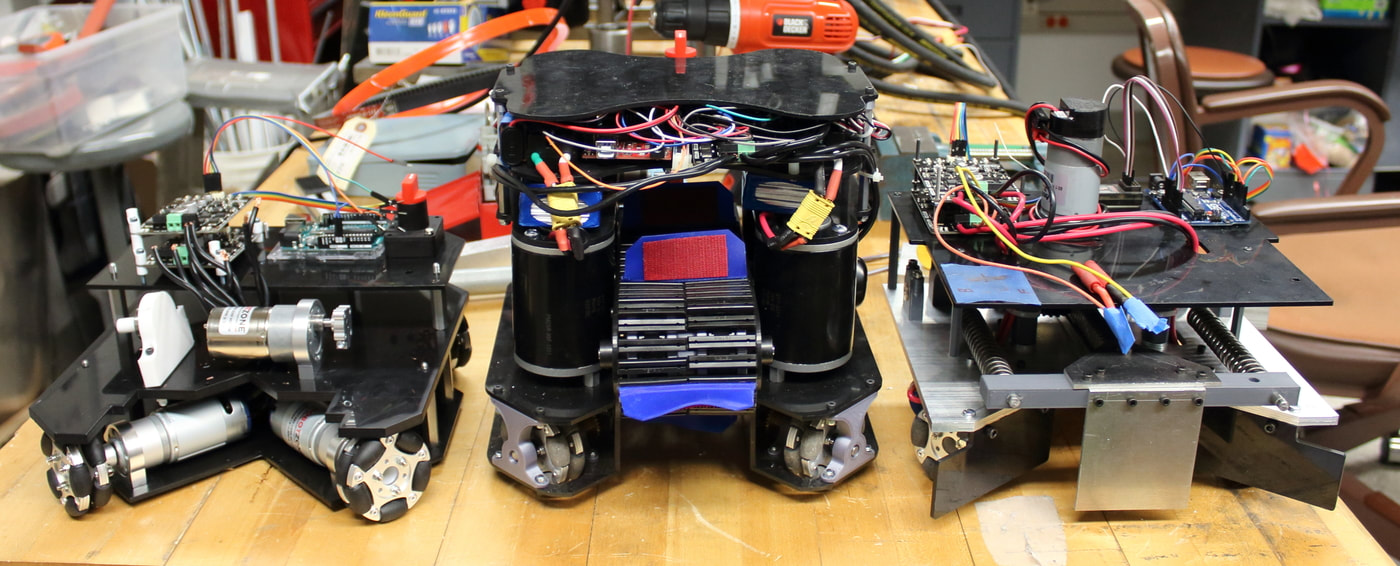
Below are the three robots built. I split the design of the three robots between the most experienced mechanical designers on the team. Treating them as "senior engineers", I partnered each one with one of the less experienced "junior engineers", effectively splitting the project into three sub-projects. Every week I met with them to review and improve their designs. I managed to teach them a lot about robotics and I'm proud of their progress.