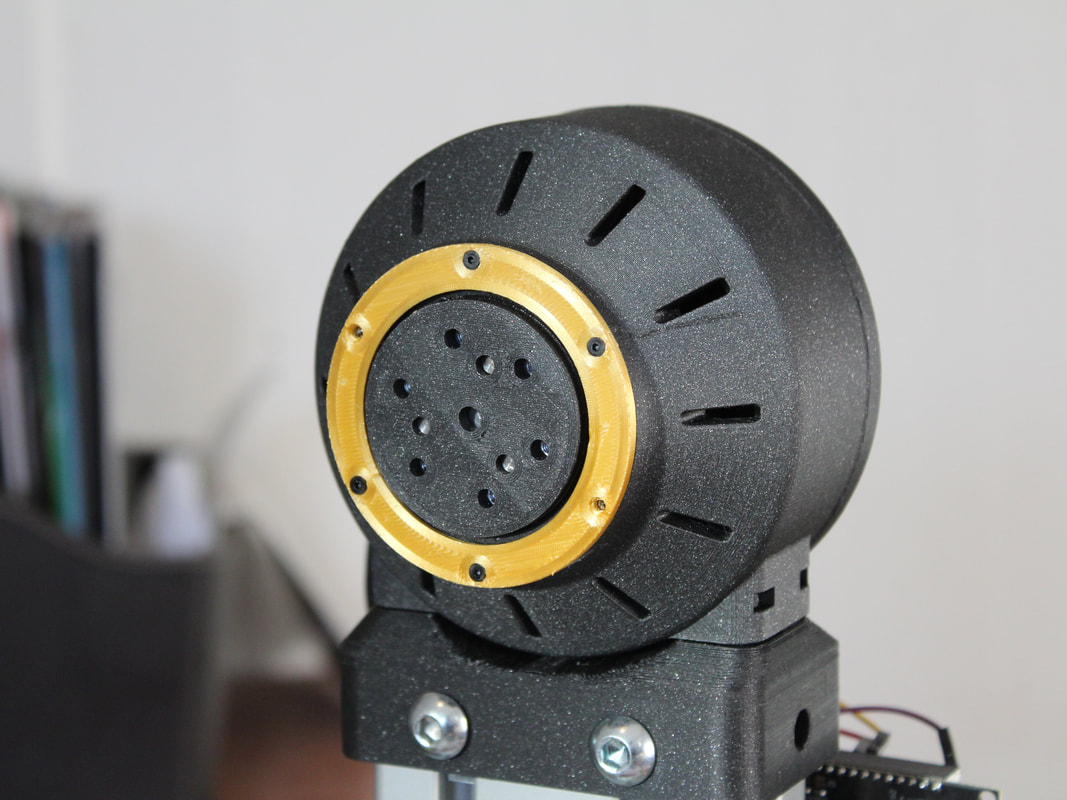


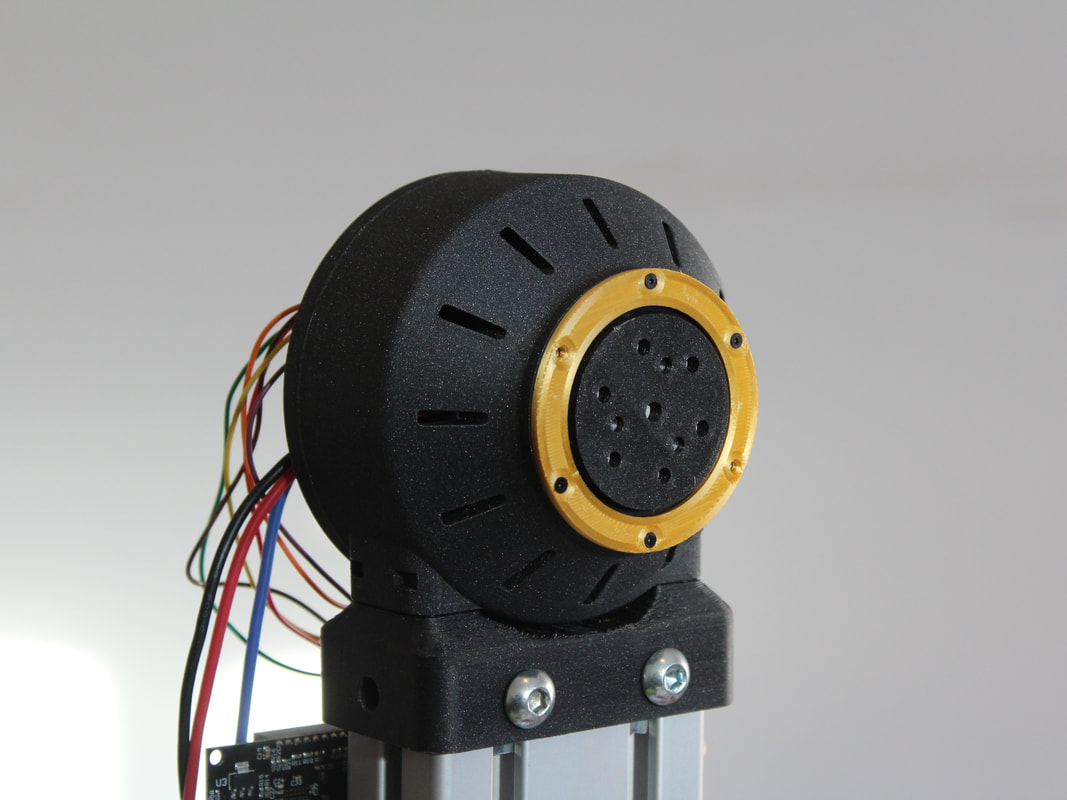
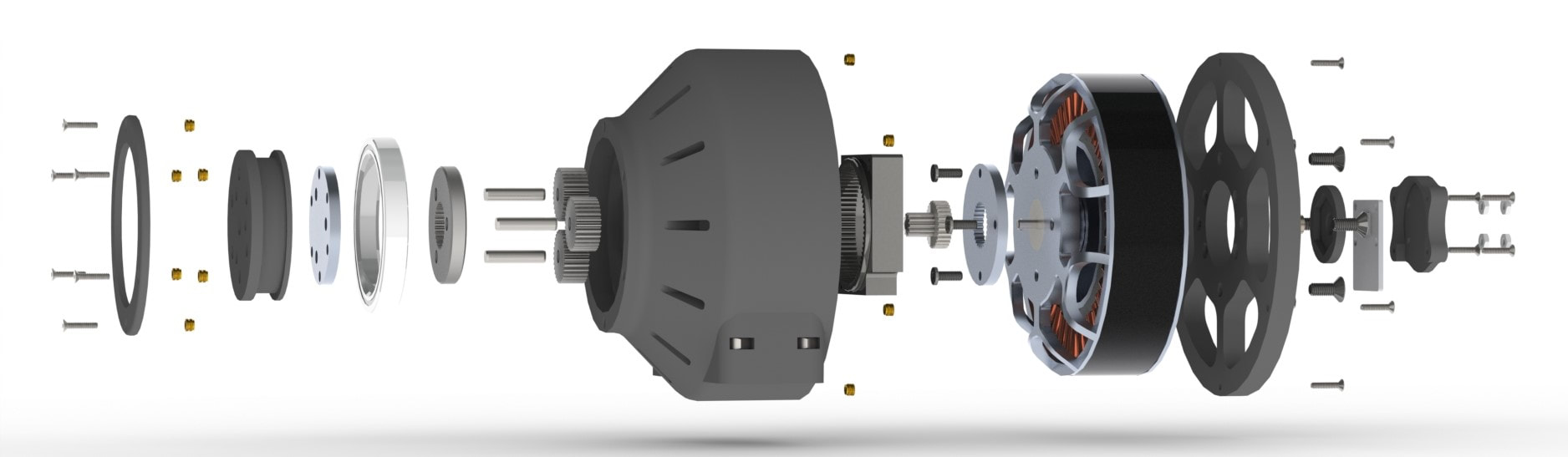
SpryDrive is an affordable actuator based on the quasi-direct drive (QDD) scheme. It is composed of a brushless outrunner motor, a low-cost metal gearbox, and a 3D-printed housing. Inspired by Gabrael Levine's OpenTorque actuator, but takes up less volume. The lower cost of the smaller bearing makes up for the added cost of the steel gears.
So far, I have tested an output torque of 33 Nm, but theoretically the actuator should be able to go much higher (in burst).
Hackaday Page
Github Page
So far, I have tested an output torque of 33 Nm, but theoretically the actuator should be able to go much higher (in burst).
Hackaday Page
Github Page
|
|
|