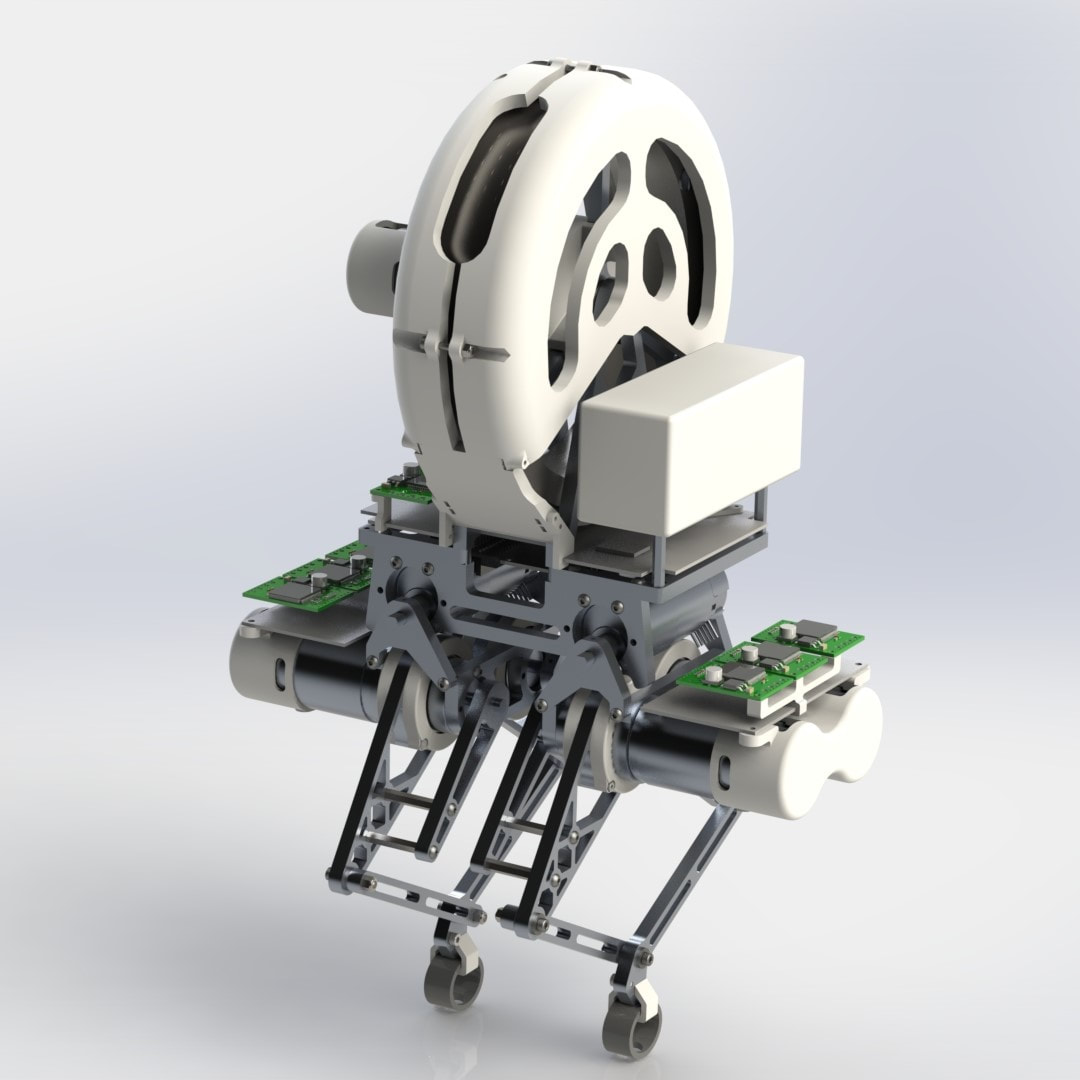
I designed this robot in my sophomore year of undergrad to begin developing my skills in legged robot design and control theory.
The design used five bar parallel linkages for the legs and received reaction wheel stabilization in the pitch axis.
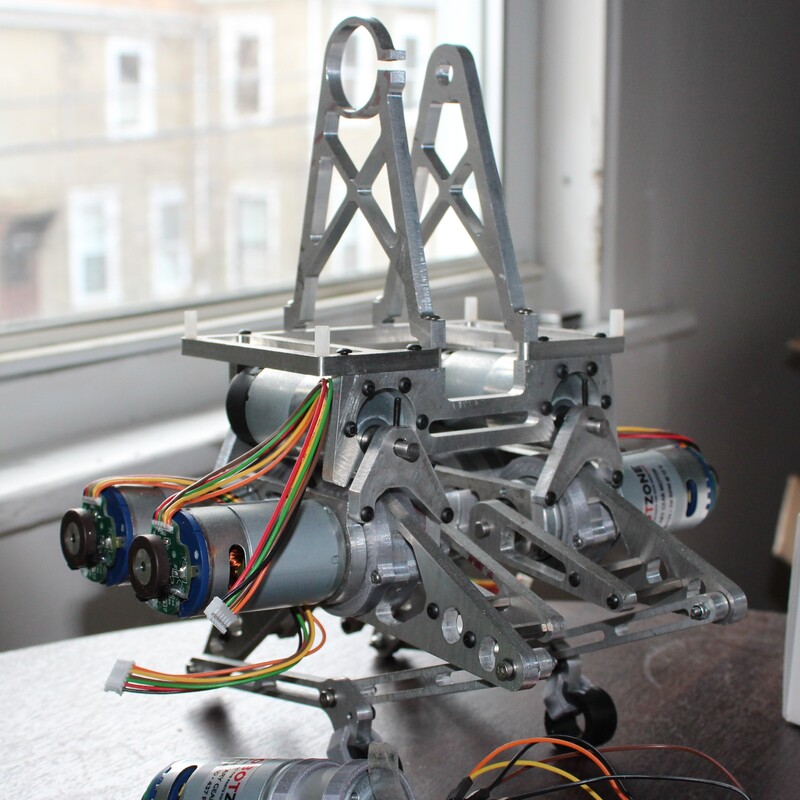
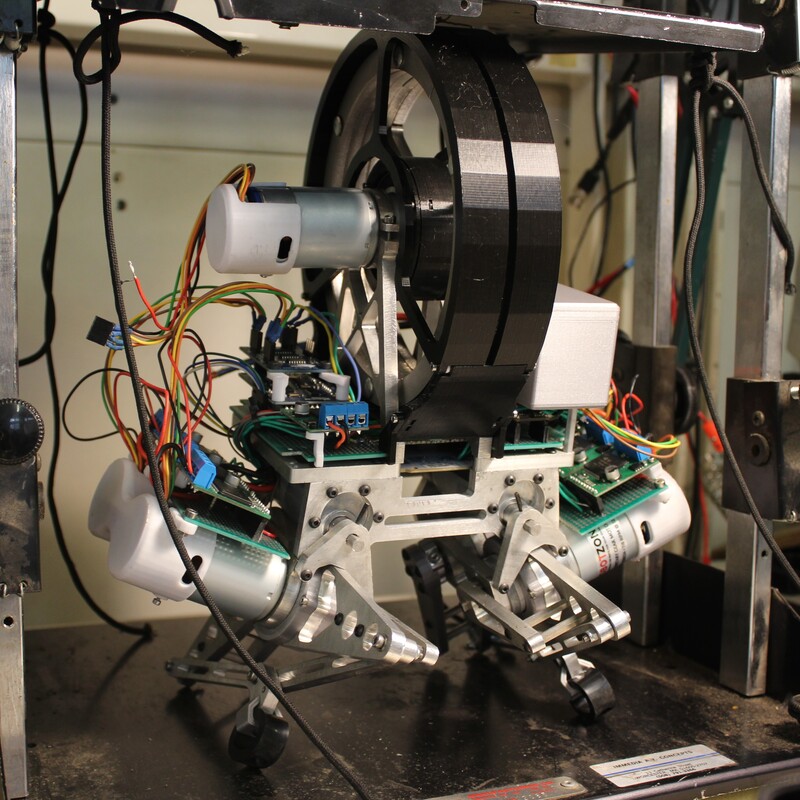
I left the mechanical build without electronics to sit on the shelf for a few years, but then in 2018 I restarted the project to gain experience in embedded electronics. The robot was initially controlled with BeagleBone Black, but I eventually switched over to an STM32F4 board.
Looking back, the mechanical design was extremely flawed and never would have worked. The legs were machined with poor tolerances, the bearings were not properly press-fitted, and I was using cheap brushed gearmotors which had voltage deadband, high inertia, and high backlash.
However, the lessons I gained from this failure greatly influenced how I approached future projects such as the Spryped and REx Hopper.
The design used five bar parallel linkages for the legs and received reaction wheel stabilization in the pitch axis.
I left the mechanical build without electronics to sit on the shelf for a few years, but then in 2018 I restarted the project to gain experience in embedded electronics. The robot was initially controlled with BeagleBone Black, but I eventually switched over to an STM32F4 board.
Looking back, the mechanical design was extremely flawed and never would have worked. The legs were machined with poor tolerances, the bearings were not properly press-fitted, and I was using cheap brushed gearmotors which had voltage deadband, high inertia, and high backlash.
However, the lessons I gained from this failure greatly influenced how I approached future projects such as the Spryped and REx Hopper.